Tin tức
IMU là gì và hoạt động như thế nào trong khảo sát trắc địa
Máy GPS RTK 2 tần số đã được sử dụng rất rất nhiều trong ngành khảo sát và tạo lập bản đồ có độ chính xác cao, ví dụ như khảo sát địa chính, khảo sát đất đai, khảo sát kỹ thuật, khảo sát xây dựng và đường trường trạm dây điện cũng như UAV, USV, lái xe thông minh, khảo sát và lập bản đồ, v.v.. Với việc sử dụng ngày càng nhiều máy GPS RTK 2 tần số cho hiệu quả, tiện lợi và an toàn cao hơn
Khi khảo sát trắc địa, yêu cầu căn chỉnh giữa bọt thuỷ của cột sào khi sử dụng máy GPS RTK để đảm bảo rằng định tâm và đường thẳng đứng nơi đặt điểm đo trùng nhau. Theo tính toán mô hình, có thể coi rằng trong hệ tọa độ địa lý cục bộ (hệ n), tâm pha của ăng-ten GNSS với phương ngang của điểm đo và tọa độ độ cao khác nhau về chiều dài thanh định tâm, như trong Hình 1:

Hình 1. Đo lường truyền thống
Với máy GPS RTK truyền thống rất dễ thực hiện trong phần mềm. Tuy nhiên, không hiệu quả và thuận tiện, đặc biệt trong trường hợp góc tường hẹp nơi khó đo được các điểm hoặc không thể tiếp cận được. Trong trường hợp đó, máy GPS RTK có chức năng đo độ nghiêng sử dụng điều hướng tích hợp RTK/INS để đạt được phép đo độ nghiêng. Những loại máy này được gọi là máy GPS RTK IMU
Phép đo độ nghiêng máy GPS RTK IMU được thực hiện trong như sau:
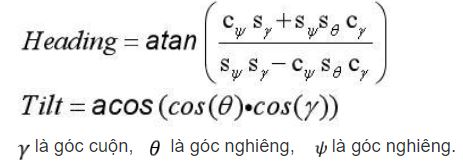
Đường nối tâm pha anten GNSS và đầu cực định tâm được coi là một vectơ (vectơ L). Trong hệ tọa độ cục bộ (hệ n), khi xác định hướng mà vectơ nghiêng, tức là góc phương vị, và độ nghiêng bao nhiêu, tức là góc nghiêng (Tilt), thì tọa độ của điểm đo có thể được xác định bằng phép biến đổi hình chiếu. Bằng cách này, để thực hiện phép đo độ nghiêng là thu được hai góc này.
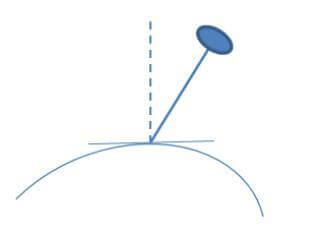
Hình 2. Đo độ nghiêng RTK điều hướng quán tính
Khi thiết kế máy GPS RTK IMU điều hướng quán tính, căn chỉnh trục Z của bộ đo lường quán tính (IMU) song song với vectơ L. Ta đặt hệ tọa độ sóng mang (hệ b) song song với trục nhạy của gia tốc kế 3 trục và gốc tọa độ nằm ở giao điểm của các trục, tạo thành hệ tọa độ thuận.
Khi đó, bất kể máy GPS RTK di chuyển như thế nào thì vectơ L vẫn là vectơ có giá trị không đổi. Sử dụng mối quan hệ xác định này, hai góc nói trên có thể được giải quyết bằng cách xác định mối quan hệ giữa hệ b và hệ n, tức là góc nghiêng mà hệ thống định vị tích hợp RTK/INS thu được trong thời gian thực.
Ngoài ra, việc thu được góc nghiêng lúc đầu và duy trì độ chính xác góc nghiêng là yếu tố quan trọng quyết định độ chính xác của phép đo độ nghiêng trong hệ thống định vị tích hợp RTK/INS.

Sử dụng máy GPS RTK IMU chắc chắn sẽ cải thiện hiệu quả khảo sát: không cần hiệu chuẩn tại chỗ và không cần căn chỉnh bọt thuỷ sào, tiết kiệm rất nhiều thời gian, đo nhiều điểm hơn và kết quả chính xác cao hơn, giảm công việc lặp lại
Tích hợp PPP GNSS và MEMS-IMU tần số kép điều hướng trong môi trường bị che khuất
Tích hợp PPP GNSS và MEMS-IMU tần số kép điều hướng Bài viết này nghiên ...
IMU Là Gì? Ý Nghĩa IMU Trên Các Máy Định Vị GNSS 2 Tần
IMU (Inertial Measurement Unit) là một mô-đun cảm biến dùng để đo các thông số ...
5 Bình luận

Giới thiệu dòng máy GPS RTK CHC i90 IMU thế hệ tiên tiến hiện đại nhất
Dòng máy GPS RTK CHC i90 IMU được hỗ trợ bởi công nghệ CHCNAV IMU-RTK ...