Chuyển giao công nghệ
Hướng Dẫn Đo RTK Bằng Phần Mềm Egstar 3.0
Hướng Dẫn Đo RTK Bằng Phần Mềm Egstar 3.0
Đo RTK Bằng Phần Mềm Egstar 3.0
Hiện nay, phần mềm Egstar được tích hợp và sử dụng rộng rãi trong rất nhiều máy GPS RTK, đặc biệt là các dòng máy của hãng South và Kolida. Bài viết này sẽ hướng dẫn bạn đo RTK sử dụng phần mềm Egstar 3.0.
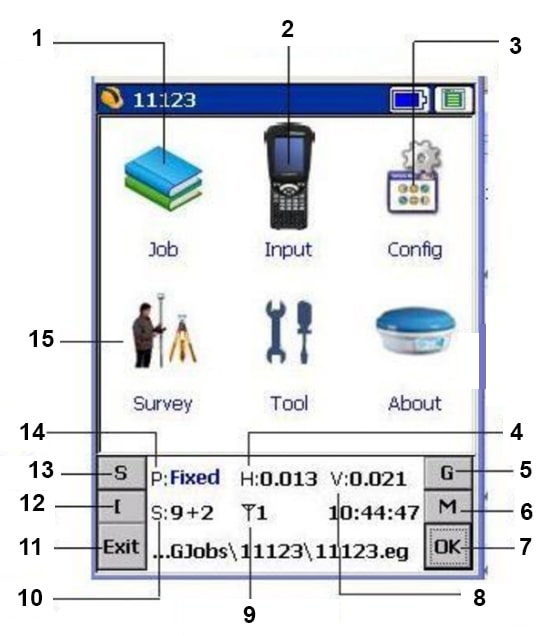
Giao diện MENU chính của phần mềm Egstar 3.0
- 1 – Cài đặt Job
- 2 – Quản lý dữ liệu
- 3 – Cấu hình tham số
- 4 – HRMS
- 5 – Đồ họa
- 6 – Màn hình chính
- 7 – Xác nhận
- 8 – VRMS
- 9 – Chế độ giao tiếp
- 10 – Số vệ tinh
- 11 – Thoát
- 12 – Thông tin vệ tinh
- 13 – Chuyển đến
- 14 – Tình trạng (Fixed hay không)
- 15 – Các ứng dụng khảo sát

Xem thông tin vệ tinh

Màn hình đồ họa
1. Phương pháp đo với Trạm Base đã biết tọa độ
Bước 1: Khởi động phần mềm
- Khởi động FiledBook, click vào biểu tượng cửa sổ để mở MENU
- Click dúp vào biểu tượng để khởi động phần mềm EGStar 3.0

Bước 2: Tạo Job
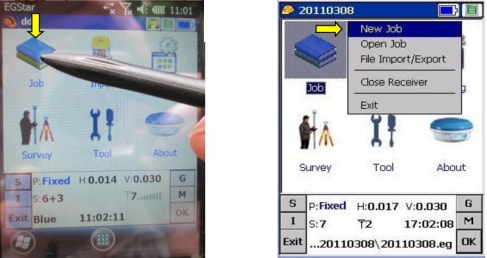
Màn hình tạo Job
- MENU Job có các chức năng:
- New Job: Tạo một Job mới
- Open Job: Mở một Job có sẵn trong máy
- File Import/Export: Xuất, nhập dữ liệu file job
- Exit: Thoát Menu Job
- Để tạo Job mới, click vào biểu tượng Job New Job để tạo Job mới
- Storage Media: Chọn vị trí lưu Job
- Project name: Ở đây chọn nháp là kkk
- Copy Mode: Lấy phần cài đặt của Job đã có sẵn, nếu tạo mới hoàn toàn job thì không cần chọn mục này.
- Click OK để hoàn tất việc tạo Job mới
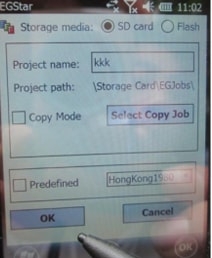
Tạo một Job khi sử dụng EGStar 3.0
Bước 3: Cài Đặt Job
Từ MENU chính → Config → Job Config

Từ hình trên, bạn cài đặt các thông số như sau:
- Mục Antenna: Nhập chiều cao antenna, chú ý đây là chiều cao của Rover
- Nhập chiều cao tại ô Ant.H
- Chọn phương pháp đo cao, có 4 phương pháp: Real, Slant, Pole, Slice
- Mục Limit: Cài đặt các thông số:
- Mask angle: Góc ngưỡng thu vệ tinh
- Time zone: Nhập múi giờ địa phương
- Coordinate Order: Định dạng ghi tọa độ
- HRMS limit: Giới hạn sai số mặt bằng tối đa
- VRMS limit: Giới hạn sai số độ cao tối đa
- PDOP limit: Giới hạn PDOP, click chọn Use để sử dụng
- Dist.To Base: (m) khống chế khoảng cách tối đa từ trạm Base đến trạm Rover
Bước 4: Tạo mới và cài đặt hệ tọa độ
Từ Menu chính → Config → Coordinate System → Xuất hiện cửa sổ Coordinate System List với các hệ tọa độ đã tạo sẵn.
- Để tạo mới hệ tọa độ ta click chọn Add
- Để sửa hệ tọa độ đã tạo chọn EDIT như hình dưới

Nhập các thông số cho hệ tọa độ: Chỉ cần nhập các thông số ở mục Projection và mục 7 Parameters, các mục khác để mặc định như hình dưới.

- Mục Projection:
- Coord. System: Đặt tên hệ tọa độ
- Ellipsoid name: Chọn Ellipsoid
- Method: Chọn phép chiếu
- Central Meridian: Nhập kinh tuyến trục, định dạng: Độ.Phút.Giây. Ví dụ 105.30.00
- False N: Dịch trục N=0
- False E: Dịch trục E=500000
- Scale: Nhập tỷ lệ biến dạng tương ứng với từng múi chiếu
- Project H: 0, Lat. Of Origin: 0, Parallel 2: 0
- Mục 7 Parameters:
- Click chọn Use 7 Parameters, Nhập các thông số tính chuyển – 7 tham số tính chuyển từ WGS-84 sang VN-2000 theo QĐ 05/2007/QĐ-BTNMT
- ΔX (m): 191,90441429
- ΔY (m): 39,30318279
- ΔZ (m): 111,45032835
- Δα (s): 0.00928836
- Δβ (s): -0.01975479
- Δγ (s): 0.00427372
- X0: 0
- Y0: 0
- Z0: 0
Bấm OK trên góc phải màn hình để hoàn tất quá trình tạo hệ tọa độ mới đồng thời trở về MENU chính
Bước 5: Kết nối Bluetooth với trạm Base
Từ MENU chính → Config → Bluetooth Manager → Xuất hiện màn hình Bluetooth Manager như hình dưới.

Các bước kết nối Bluetooth với máy thu:
- Click Close để ngắt kết nối với các thiết bị khác ( Nếu đã và đang kết nối)
- Click Search để tìm kiếm Bluetooth của máy thu → xuất hiện thông báo “Bluetooth Search Success” thiết bị đã tiến hành quét xong → Bấm OK để chấp nhận → Xuất hiện danh sách các máy thu mà thiết bị dò tìm được
- Chọn máy thu cần kết nối ( Máy thu đặt làm trạm Base), Click “Connect” để kết nối máy thu đó
- Xuất hiện thông báo “Bluetooth Connect Seccess“, Bấm OK để chấp nhận, sau đó bấm EXIT để thoát
Bước 6: Thiết lập trạm Base
Từ MENU Chính → Config → Device Config → Instrucment Config → Xuất hiện hộp thoại Instrument.
1. Chọn chế độ làm việc – chọn máy thu làm trạm Base
Từ hộp thoại Instrument → Work Mode Setting → Set Work Mode → Next → Base → OK

2. Chọn phương pháp truyền dữ liệu Data link
Từ hộp thoại Instrument → Work Mode Setting → Set Data Link → Next External Radio → OK ( Đối với trạm Base ta chọn radio ngoài)

Chú ý: Việc cài đặt chế độ làm việc, phương pháp truyền số liệu cho từng máy thu chỉ cần làm một lần, máy thu sẽ mặc định chế độ làm việc này cho các lần tiếp theo. Điều này có nghĩa khi ta chọn máy nào đó làm trạm Base hay Rover thì từ lần sau chỉ cần kết nối Bluetooth, máy thu đó sẽ mặc định chế độ làm việc như thế.
3. Cài đặt Base
Từ hộp thoại Instrument → Base Setting → Xuất hiện hộp thoại như hình dưới:

Nhập các thông số cho trạm Base
- Base Parameters:
- Msg.type: RTCM3
- Diff.mode: RTK
- Ant.H: Cao Ăng ten của trạm Base
- Interval time: 1
- Mask angle: Góc ngưỡng 15 độ
- PDOP Limit: Giới hạn PDOP
- Base Coordinate: Nhập tọa độ Base. Bạn click Plane để nhập tọa độ N, E, H
- Bấm Start, Xuất hiện Base Start Successful là hoàn thành cài đặt trạm Base. Bấm nút có chữ “C”để về Menu chính
Bước 7: Kết nối Bluetooth với trạm Rover
Làm tương tự bước 5 để kết nối Bluetooth với trạm Rover
Bước 8: Thiết lập trạm Rover
Từ Menu Chính → Config → Device Config → Instrument Config → Xuất hiện hộp thoại Instrument
1. Chọn chế độ làm việc: Chọn máy thu làm trạm Rover
Từ hộp thoại Instrument → Work Mode Setting → Set Work Mode → Next → Rover → OK

2. Chọn phương pháp truyền dữ liệu: Data link
- Từ hộp thoại Instrument → Work Mode Setting → Set Data Link → Next → Internal Radio → OK ( Đối với trạm Rover ta chọn Raido ngoài)
- Bấm nút có chữ “C” để trở về Menu chính. Như vậy ta đã hoàn thành việc thiết lập trạm Rover.
Chú ý: Việc cài đặt chế độ làm việc và phương pháp truyền số liệu cho trạm Rover chỉ cần làm một lần, máy thu sẽ mặc định chế độ làm việc này cho các lần tiếp theo. Từ lần sau chỉ cần kết nối Bluetooth, máy thu đó sẽ mặc định chế độ làm việc là trạm Rover ( Có thể bỏ qua bước 8)

Bước 9: Kết nối Radio trạm Rover với trạm Base
- Từ Menu Chính → Config → Device Config → Radio Config → Xuất hiện hộp thoại Radio Channel
- Tại mục Switch Channel ta chọn kênh Radio tương ứng với kênh trên bộ phát ở trạm Base.
- Bấm Swich để chuyển sang kênh vừa chọn
- Bấm Exit để thoát về Menu chính. Lúc này trên màn hình sổ tay sẽ xuất hiện số kênh vừa chọn và cột sóng nhận được

Bước 10: Bắt đầu các chương trình đo chi tiết
- Từ Menu Chính → Survey → Point Survey → Xuất hiện hộp thoại Point Survey
- Click chọn biểu tượng mũi tên dưới góc dưới bên phải màn hình để lấy các phím chức năng
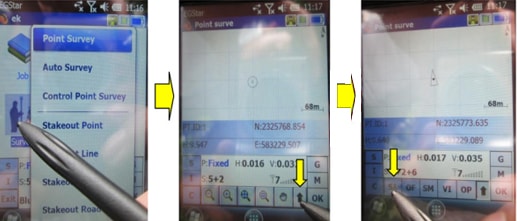
- Lưu điểm đo: Click SA nếu các sai số đạt dưới giới hạn đã thiết lập, phần mềm sẽ hiện ra cửa số như hình dưới → Nhập tên điểm, mã Code, chiều cao Ant, phương pháp đo cao → Ấn OK để lưu điểm đo
- Xem lại danh sách điểm đo: Ta click VI để vào danh sách điểm đã đo, ở đây ta có thể sửa chữa thông tin nhập vào của điểm đo hoặc xóa các điểm đo

2. Phương pháp đo với Trạm Base không biết tọa độ
Ngoài phương pháp đo truyền thống là đặt trạm Base tại mốc đã biết tọa độ, một số máy thu hãng Kolida còn cho pháp ta đo chi tiết với trạm Base không biết tọa độ. Ta có thể đặt trạm Base tại vị trí bất kỳ, lúc này tọa độ sẽ tính theo trạm Rover.
Bước 1 → Bước 5
Làm tương tự phần 1
Bước 6: Thiết lập trạm Base
Tại bước 6, phần cài đặt trạm Base ta không nhập tọa độ N, E, H cho trạm Base mà click chọn Lat/Lon để máy thu GNSS tự định vị tuyệt đối để lấy tọa độ vị trí tạm thời làm trạm Base như hình dưới

Bước 7 → Bước 9
Làm tương tự phần 1
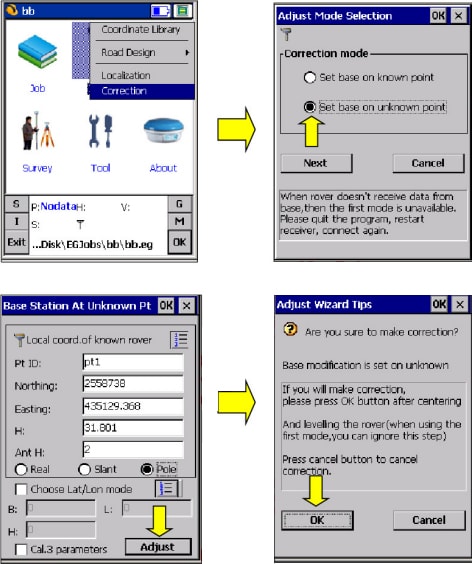
Bước 10: Adjust tọa độ trạm Base theo trạm Rover
Sau khi hoàn thành việc kết nối Radio giữa trạm Base và trạm Rover, ta tiến hành adjust tọa độ trạm Base theo tọa độ trạm Rover.
Di chuyển trạm Rover tới mốc đã biết tọa độ và tiến hành thao tác như sau:
Từ Menu chính → Input → Correction → Set Base On Unknown Point → Next → Xuất hiện hộp thoại Base Station At Unkown Pt
Bước 11: Vào chương trình đo chi tiết
Tiến hành đo chi tiết như phần 1
3. Thiết lập đo RTK sử dụng trạm Cors
Phương pháp đo RTK sử dụng trạm Cors ngày càng được áp dụng rộng rãi nhờ những ưu điểm riêng của nó. Trong phương pháp này ta chỉ cần chuẩn bị máy Rover và địa chỉ trạm CORS là có thể tiến hành các phép đo RTK.

1. Chọn phương pháp truyền dữ liệu (Data link)
Từ hộp thoại Instrument → Work mode setting → Set data link → Next → GPRS/GSM → Ok.
(Đối với phương pháp đo trạm CORS)

Bấm phím có chữ “C” về Menu chính, hoàn thành việc thiết lập trạm Rover đo trạm CORS.
Chú ý: Cũng tương tự như việc thiết lập trạm Rover đo Radio, việc cài đặt chế độ làm việc và phương pháp truyền số liệu cho trạm Rover đo trạm CORS chỉ cần làm một lần, máy thu sẽ mặc định chế độ làm việc này cho các lần tiếp theo
Bước 2: Kết nối trạm Cors
Từ Menu chính → Config → Device Config → NetWork Config → Xuất hiện hộp thoại NetWork Config.
Bấm Add để thêm một tài khoản trạm CORS, nhập đầy đủ các thông số như hình bên dưới:

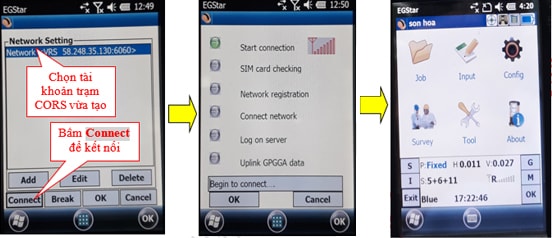
Sau khi nhập đầy đủ thông tin tài khoản trạm CORS, bấm Get sourcetable để lấy danh sách các trạm CORS, chọn tên trạm cần kết nối ở mục Access, sau đó bấm OK

Phần mềm tự động quay lại trang màn hình Network setting, ở đây ta chọn tài khoản trạm CORS vừa tạo, bấm Conect để kết nối, quá trình kết nối sẽ trải qua 6 bước, khi nào chạy hết 6 bước là kết nối thành công. Xem hình bên dưới:
4. Hướng dẫn trút dữ liệu từ sổ tay ra máy tính
Sau khi đo xong, định dạng dữ liệu xuất để trút ra máy tính.
- Thao tác: Kết nối sổ tay với máy tính thông qua cáp trút
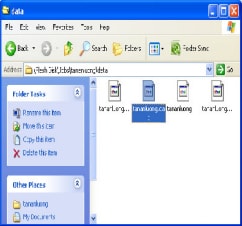
- Mở chương trình Microsoft Active Sync → chọn Explore → Chọn phần Flast Disk

Tiếp theo chọn Job ( File làm việc) → Data → Vào file công trình đang làm

Chọn file có đuôi DAT → COPY → Lưu vào một thư mục để xử lý hậu kỳ theo yêu cầu công việc
Trên đây là giới thiệu chi tiết cách sử dụng phần mềm EGStar 3.0 khi làm việc trên máy GPS RTK South và máy GPS RTK Kolida
- Tài liệu được biên soạn dựa theo tài liệu tiếng Anh kết hợp kinh nghiệm làm việc thực tế.
- Tác giả: Vũ Trọng Lâm – Phòng Kỹ Thuật Công Ty CP Phát Triển Công Nghệ Trắc Địa Việt Nam.
Quý khách khi sử dụng sản phẩm, dịch vu trắc địa của công ty sẽ luôn nhận được sự hỗ trợ nhiệt tình từ đội ngũ kỹ sư qua Video Call trong quá trình làm việc.
Mọi chi tiết xin liên hệ:
- CÔNG TY CP PHÁT TRIỂN CÔNG NGHỆ TRẮC ĐỊA VIỆT NAM
- Địa chỉ: Số 167, phố Chùa Láng – Q.Đống Đa – TP.Hà Nội
- VPGD: Số 21, ngõ 10 – đường Trần Duy Hưng – Q.Cầu Giấy – TP.Hà Nội
- Điện thoại: 0243 7756647 – 0913.37.86.48
- Đại diện: Ông Nguyễn Văn Dũng
- MST: 0102305681 – STK: 12510000160392
- Tại Ngân Hàng TMCP Đầu Tư Và Phát Triển Việt Nam – Chi nhánh Đông Đô