Chuyển giao công nghệ
Ứng Dụng Đặc Biệt Máy Toàn Đạc Điện Tử Leica ( FlexLine Series) (P2)
Trong series bài viết Hướng Dẫn Sử Dụng Máy Toàn Đạc Điện Tử, Chúng tôi đã có loạt bài viết hướng dẫn chi tiết cách sử dụng máy toàn đạc điện tử Leica:
Loạt bài viết chi tiết A-Z gồm hình ảnh và hình vẽ minh họa cách sử dụng máy toàn đạc điện tử Leica ( FlexLine Series):
- Các phím cứng, phím mềm, màn hình và cây thư mục – TẠI ĐÂY
- Cài đặt setting, cài đặt phím FNC, Trigger, User, Định tâm laser và cân bằng bọt thủy điện tử – TẠI ĐÂY
- Thiết lập và định hướng trạm máy – TẠI ĐÂY
- Cách đo vẽ bản đồ, chuyển điểm thiết kế ra thực địa, đường thẳng tham chiếu – TẠI ĐÂY
- Cách đo khoảng cách gián tiếp, đo độ cao không với tới, tính diện tích khối lượng – TẠI ĐÂY
- Ứng dụng đặc biệt: Cung tham chiếu và mặt phẳng tham chiếu – TẠI ĐÂY
- Ứng dụng đặc biệt: Ứng dụng giao thông Road 2D, ứng dụng COGO – TẠI ĐÂY
- Truyền trút dữ liệu – TẠI ĐÂY
Trong bài viết này, Công Ty CP Phát Triển Công Nghệ Việt Nam sẽ chia sẻ phần cuối trong loạt bài viết hướng dẫn sử dụng máy toàn đạc điện tử Leica: Ứng dụng đặc biệt của máy toàn đạc điện tử Leica ( FlexLine Series) Phần 2, Nội dung bao gồm:
1. Ứng dụng đặc biệt máy toàn đạc điện tử Leica: Ứng dụng giao thông (Road 2D)
Road 2D là ứng dụng được sử dụng để đo hoặc chuyển điểm thiết kế ra ngoài thực địa dựa vào yếu tố đã được xác định trước. Yếu tố có thế là một đường thẳng, đường cong hoặc một đường xoắn chân ốc. Mắt xích (chainage), khoảng cách tăng dần, khoảng offset (trái và phải ) có thể được nhập vào tuỳ theo yêu cầu công việc.

- P0 : Điểm tâm
- P1 : Điểm bắt đầu của cung
- P2 : Điểm kết thúc của cung
- P3 : Điểm chuyển thiết kế ra thực địa
- a : Ngược chiều kim đồng hồ
- b : Theo chiều kim đồng hồ
- c+ : Khoảng cách từ điểm đầu của cung, theo đường cong (following curve)
- d- : Khoảng cách offset vuông góc từ cung
- r : Bán kính của cung.
Thao tác thực hiện:
Lựa chọn Programs từ màn hình MAIN MENU, di chuyển đến trang chứa ứng dụng Road 2D và lựa chọn. Sau khi các bước thiết lập trạm máy như thông thường thực hiện xong,màn hình hiện ra:

Tới đây bạn có thể lựa chọn phương pháp:
- Straight: đường thẳng
- Curve: đường cong
- Spiral: đường xoắn chân ốc cho phù hợp với công việc của mình.
Hình vẽ minh họa:
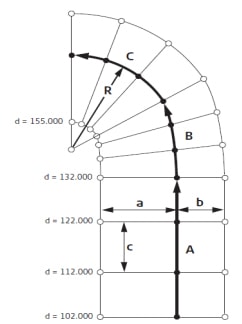
- A : Đoạn thẳng
- B : Đường xoắn chân ốc
- C : Đường cong
- R : Bán kính
- a : Khoảng cách vuông góc offset trái
- b : Khoảng cách vuông góc offset phải
- c : Khoảng tăng dần
- d : Mắt xích (chainage)
Trong giới hạn bài viết này, chúng tôi xin giới thiệu tới các bạn phương pháp đường thẳng:
Từ màn hình 1, ấn F1 ( Straight), màn hình xuất hiện:

Điểm đầu (StartPt) và điểm cuối (EndPt) có thể được đo ngoài thực địa, nhập vào trực tiếp, hoặc gọi ra từ trong bộ nhớ máy.
Sau khi thực hiện xong, màn hình hiện ra tiếp theo:

Tới đây người sử dụng nhập vào giá trị mắt xích (chainage) và tuỳ theo yêu cầu công việc mà lựa chọn Check (đo kiểm tra ) hoặc Stake (chuyển thiết kế ra thực địa)
- Phương pháp Curve: Tương phương pháp Straight chỉ khác là nhập vào bán kính và hướng cung.
- Phương pháp Spiral: Tương phương pháp Straight nhưng khi sử dụng phương pháp này người sử dụng cần nhập vào Rad/Pad (bán kính/ thông số) hoặc Rad/Len (bán kính/chiều dài) và lựa chọn kiểu Spiral và hướng của Spiral.
Hình vẽ sau sẽ mô tả cho bạn Spiral:

Trong hình vẽ:
- A : Spiral in
- B : Spiral out
2. Ứng dụng đặc biệt máy toàn đạc điện tử Leica: Ứng dụng COGO
Ứng dụng COGO có các phương pháp:
- Inverse and Traverse: Giải bài toán ngược và bài toàn thuận ( bài toán đường chuyền đa giác)
- Intersections: Các bài toán giao điểm như
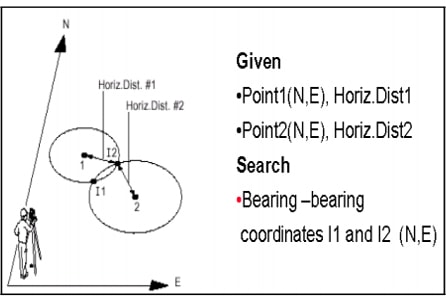
- Brg – Brg: Tính tọa độ giao điểm dựa vào “phương vị – phương vị“
- Brg – Dist: Tính tọa độ giao điểm dựa vào “phương vị – khoảng cách“
- Dist – Dist: Tính tọa độ giao điểm dựa vào “khoảng cách- khoảng cách“
- Ln – Ln: Tính toạ độ giao điểm dựa vào 4 điểm đã biết toạ độ
- Offset: Bài toán offset – Dịch chuyển/ số đo toạ độ vuông góc
- Extension: Bài toán kéo dài đoạn thẳng
Với máy toàn đạc điện tử Leica ( FlexLine Series), để vào ứng dung COGO, bạn tiến hành:
Từ màn hình Main menu → Lựa chọn Prog → ấn Enter/OK→ ấn phím chuyển trang đến trang chứa COGO → F1 (COGO). Màn hình hiện ra như sau:

Tới đây người sử dụng cần tiến hành làm lần lượt các bước:
- F1 Set Job : Đặt tên công việc
- F2 Set Station : Thiết lập trạm máy
- F3 Set Orientation: Thiết lập điểm định hướng
(Đã có bài viết hướng dẫn chi tiết cách thiết lập và định hướng trạm máy)
Sau khi thiết lập và định hướng trạm máy, Để tiến hành đo ấn F4 (Start), màn hình hiện ra:

Tới đây, bạn chỉ cần chọn phương pháp phù hợp nhất với nhiệm vụ đo đạc, trắc địa trên thực địa
Chúng tôi sẽ hướng dẫn chi tiết tất cả các phương pháp như sau:
2.1 Giải bài toán thuận và bài toán ngược ( Inverse và Traverse)
Để tiến hành, từ màn hình số 2, bạn ấn F1 (Inverse and Traverse), màn hình hiện ra:
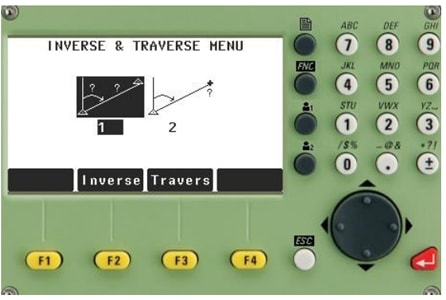
Tới đây bạn có thể lựa chọn Inverse: Tính khoảng cách và phương vị, hoặc Traverse: Tính tọa độ điểm
2.1.1 Inverse – Giải bài toán ngược – tính khoảng cách và phương vị

Bằng cách gọi điểm trong bộ nhớ, nhập tọa độ hai điểm đã biết, hoặc đo trực tiếp ngoài thực địa bạn sẽ tính được góc phương vị và khoảng cách ngang giữa hai điểm đó bằng bài toán ngược, ứng dụng có sẵn trong máy toàn đạc Leica Flexline Series (hình vẽ bên minh hoạ phương pháp).
Các tiến hành: Từ màn hình 3, ấn F2 (Inverse), màn hình hiện ra:

Tới đây:
- Nếu muốn gọi điểm trong bộ nhớ ra bạn chỉ cần nhập điểm cần tính toán sau đó ấn F3(FIND), để tìm điểm đó.
- Nếu muốn nhập trực tiếp toạ độ vào thì ấn phím F4(
 ) để di chuyển dòng thông điệp sao cho hiển thị ENH rồi tiến hành ấn F2
) để di chuyển dòng thông điệp sao cho hiển thị ENH rồi tiến hành ấn F2
[ENH], để nhập vào tên điểm và toạ độ. - Nếu muốn đo trực tiếp ngoài thực địa, Nhập tên điểm đầu tiên cần đo tới (ví dụ điểm C1) sau đó ấn phím F1(MEASURE), màn hình hiện ra:
 ) để di chuyển dòng thông điệp sao cho hiển thị ENH rồi tiến hành ấn F2
) để di chuyển dòng thông điệp sao cho hiển thị ENH rồi tiến hành ấn F2
Nhập chiều cao gương (hr) sau đó ấn F1[Meas] hoặc [DIST]+[REC] để đo. Sau đó chuyển sang điểm thứ 2 làm tương tự điểm thứ nhất.
2.1.2 Traverse – Giải bài toán thuận – tính toạ độ điểm
Bằng cách nhập các yếu tố:
- Tọa độ 1 điểm (nhập/gọi trong bộ nhớ hoặc đo ngoài thực địa)
- Phương vị
- Khoảng cách ngang
- Khoảng cách Offset (nếu có)
→ Bạn sẽ tính được tọa độ điểm cần thiết (hình vẽ bên minh hoạ phương pháp)

Cách tiến hành: Từ màn hình số 3 ấn F3 (Travers), màn hình hiện ra:

Tới đây điểm cơ sở (điểm 1 như hình vẽ trên) có thể nhập vào toạ độ, gọi trong bộ nhớ hoặc đo ngoài thực địa, cách cụ thể làm tương tự phương pháp bài toán nghịch
Sau khi thao tác xong điểm cơ sở, màn hình quay trở lại như hình 6, tiếp theo tiến hành nhập góc phương vị, khoảng cách ngang và khoảng cách Offset (nếu có) sau đó ấn F2(COMPUTE) để tính toán, màn hình hiện ra:

Tới đây nhập tên điểm (Point) vừa tính được toạ độ vào, tiếp theo nếu nếu muốn ghi lại toạ độ ấn [Store], nếu muốn chuyển điểm vừa tính được toạ độ ra ngoài thực địa ấn F1(STAKE) tiếp theo làm tương tự phần Stake Out (Chuyển điểm thiết kế ra thực địa như đã hướng dẫn)”.
2.2 Intersections – các bài toán tính toạ độ giao điểm
Sau khi thực hiện đến màn hình số 2, ấn phím F2 (Intersection), màn hình hiện ra như sau:
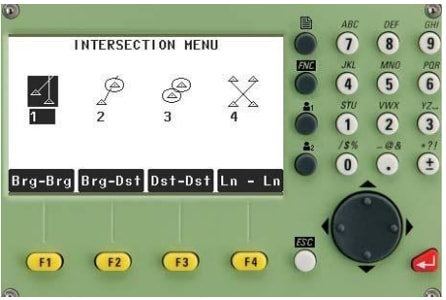
Chúng ta có các phưong pháp tính toạ độ giao điểm như sau:
- Brg – Brg: Tính tọa độ giao điểm dựa vào “phương vị – phương vị”
- Brg – Dist: Tính tọa độ giao điểm dựa vào “phương vị – khoảng cách”
- Dist – Dist: Tính tọa độ giao điểm dựa vào “khoảng cách- khoảng cách”
- Ln – Ln: Tính toạ độ giao điểm dựa vào 4 điểm đã biết toạ độ
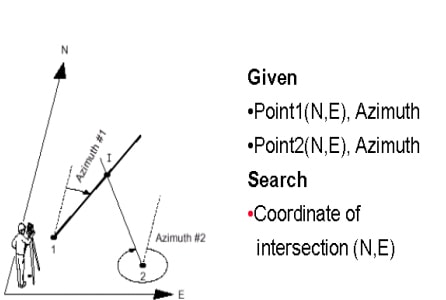
2.2.1 Tính tọa độ giao điểm dựa vào “phương vị – phương vị”
Nguyên lý tính tọa độ giao điểm dựa vào “phương vị – phương vị”: Nếu biết:
- Tọa độ điểm 1 (đo ngoài thực địa hoặc nhập toạ độ hoặc gọi trong bộ nhớ) và phương vị cạnh 1.
- Tọa độ điểm 2 (đo ngoài thực địa hoặ nhập toạ độ hoặc gọi trong bộ nhớ) và phương vị cạnh 2.
Ta sẽ tìm được tọa độ của điểm giao nhau
Cách tiến hành: Từ màn hình số 8 ấn F1 (Brg – Brg), màn hình hiện ra như sau:

Tới đây để có được toạ độ của điểm 1 và điểm 2, người sử dụng có thể đo ngoài thực địa hoặc nhập toạ độ hoặc gọi trong bộ nhớ ra (các thao tác này thực hiện tương tự như đối với bài toán ngược)
Sau đó ấn COMPUTE để tính ra toạ độ giao điểm, tiếp theo nhập tên điểm vừa tính được, tiến hành lưu lại hoặc chuyển ra thực địa.
2.2.2 Brg–Dist (tính tọa độ giao điểm dựa vào “phương vị – khoảng cách”
Nguyên lý tính tọa độ giao điểm dựa vào phương vị – khoảng cách. Nếu biết:
- Tọa độ điểm 1 (đo ngoài thực địa hoặc nhập toạ độ hoặc gọi trong bộ nhớ) và phương vị cạnh 1.
- Tọa độ điểm 2 (đo ngoài thực địa hoặ nhập toạ độ hoặc gọi trong bộ nhớ) và khoảng cách ngang
→ Ta sẽ tìm được toạ độ các điểm giao nhau.

Thao tác thực hiện như bài toán “phương vị – phương vị”
2.2.3 Dist–Dist (tính tọa độ giao điểm dựa vào “khoảng cách-khoảng cách”)
Nếu biết:
- Tọa độ điểm 1 (đo ngoài thực địa hoặc nhập toạ độ hoặc gọi trong bộ nhớ) và khoảng cách ngang.
- Tọa độ điểm 2 (đo ngoài thực địa hoặ nhập toạ độ hoặc gọi trong bộ nhớ) và khoảng cách ngang
→ Ta sẽ tìm được toạ độ các điểm giao nhau
Thao tác thực hiện tương tự bài toán trên.
2.2.4 Tính tọa độ giao điểm dựa vào 4 điểm đã biết tọa độ
Nếu biết: Tọa độ điểm, toạ độ điểm 2. Toạ độ điểm 3 và toạ độ điểm 4 ta sẽ tiềm được toạ độ giao điểm như hình vẽ dưới đây.
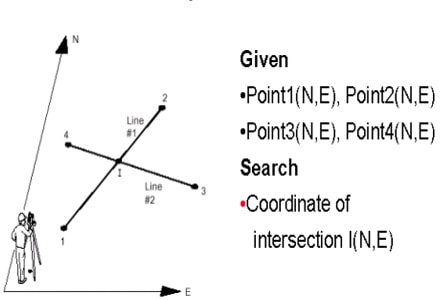
Thao tác thực hiện tương tự các bài toán trên.
2.3 Offset
Sau khi thực hiện đến màn hình 2, ấn phím F3 (Offset), màn hình hiện ra như sau:
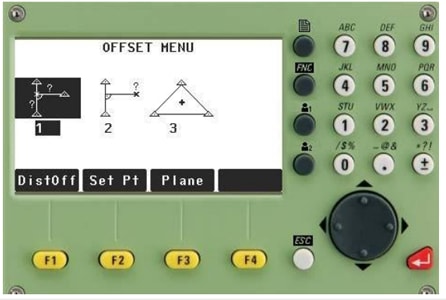
- DistOff: Tìm khoảng cách dịch chuyển ngang (offset), dọc (line) và toạ độ chân đường vuông góc.
- Set Pt: Tìm toạ độ điểm khi biết toạ độ 2 điểm tạo đường thẳng và khoảng dịch chuyển ngang, dọc tới điểm đó.
- Plan: Bài toán mặt phẳng, tìm toạ độ chân đường vuông góc của điểm offset xuống mặt phẳng đã biết và khoảng cách vuông góc đó.
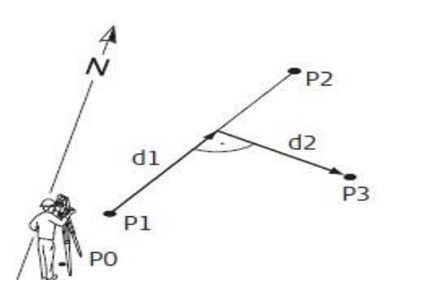
2.3.1 Distance – Offset (DistOff)
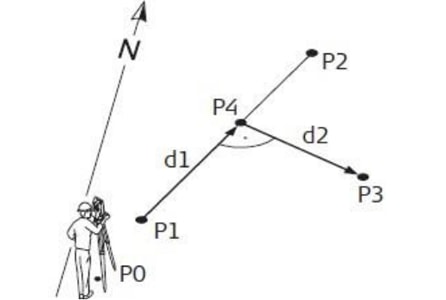
- PO : Trạm máy
- P1 : Điểm đầu đã biết
- P2 : Điểm cuối đã biết
- P3 : Điểm offset đã biết
- Cần tìm: d1, d2, P4 ?
Khi truy cập vào chương trình này màn hình hiện ra như sau:

Thao tác:
- Tạo đường Baseline: Các điểm P1, P2 có thể được gọi ra từ bộ nhớ của máy, hoặc có thể được đo trực tiếp ngoài thực địa
- Toạ độ điểm offset P3 có thể gọi ra từ bộ nhớ, nhập vào trực tiếp hoặc đo ngoài thực địa.
Sau khi hoàn thành các thao tác trên người sử dụng chỉ việc ấn [COMPUTE] để tính toán ra kết quả, kết quả tính toán ra có thể lưu vào bộ nhớ máy hoặc chuyển ra ngoài thực địa bằng cách ấn [STAKE].
2.3.2 Set point (Set Pt)
- PO : Trạm máy
- P1 : Điểm đầu đã biết
- P2 : Điểm cuối đã biết
- d1, d2 : Đã biết
- Cần tìm: P3 : Điểm offset đã biết

Thao tác thực hiện
- Điểm P1, P2 có thể được xác định tương tự phương pháp trên.
- Nhập vào d1 và d2
Ấn [COMPUTE] kết quả toạ độ sẽ được hiển thị. Điểm tìm được có thể chuyển ra ngoài thực địa hoặc lưu vào bộ nhớ máy
2.3.3 Plan Offset (Plan)
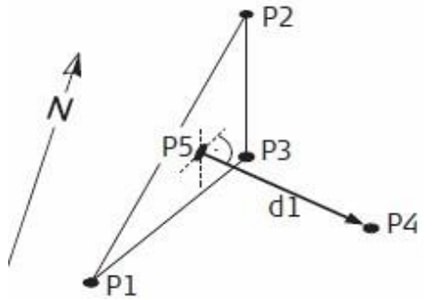
- P1, P2, P3 : Điểm đã biết toạ độ và tham gia tạo lên mặt phẳng
- P4 : Điểm offset đã biết
- Cần tìm: d1 và P5 ?
Thao tác thực hiện:

- Điểm P1, P2, P3 tạo mặt phẳng có thể được xác định tương tự các phương pháp trên.
- Điểm offset P4 cũng được xác định tương tự
- Ấn [COMPUTE] kết quả toạ độ P5 và khoảng cách d1 sẽ được hiển thị. Vị trí điểm vừa tìm được có thể xác định được nhờ ứng dụng Stake out.
2.4 Kéo dài đoạn thẳng ( Extension)
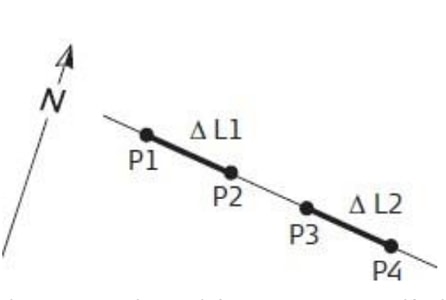
- P1 : Điểm đã biết
- P3 : Điểm đã biết
- L1, L2: Đã xác định trước
- Cần tìm: P2, P4 ? – Nằm trên đường thẳng đã cho
Thao tác thực hiện sau xác định được P1 và P3 bạn có thể lựa chọn điểm baseline là P1 hoặc P3 tuỳ ý. Nhập khoảng cách ngang L1, L2 vào thao tác tiếp theo làm tương tự phương pháp trên.
Đây là bài viết cuối cùng trong loạt bài viết về hướng dẫn sử dụng máy toàn đạc điện tử Leica ( FlexLine Series) của Công Ty CP Phát Triển Công nghệ Trắc Địa Việt Nam – Đơn vị hàng đầu trong lĩnh vực trắc địa, chuyên cung cấp, cho thuê máy trắc địa chính hãng, và thực hiện dự án trắc địa toàn lãnh thổ Việt Nam
Quý khác khi mua sản phẩm của chúng tôi, ngoài việc được hưởng chế độ bảo hành chính hãng, còn được hưởng chế độ bảo trì 24 tháng tại cửa hàng, hỗ trợ thay thế linh kiện, phụ tùng, sửa chữa với giá gốc.
- Quý khách vui lòng tham khảo: Máy toàn đạc điện tử chính hãng TẠI ĐÂY
- CÔNG TY CP PHÁT TRIỂN CÔNG NGHỆ TRẮC ĐỊA VIỆT NAM
- VPGD: Số 21, ngõ 10 – đường Trần Duy Hưng – Q.Cầu Giấy – TP.Hà Nội
- Điện thoại: 0243 7756647 – 0913.37.86.48
- Đại diện: Ông Nguyễn Văn Dũng
- MST: 0102305681 – STK: 12510000160392
- Tại Ngân Hàng TMCP Đầu Tư Và Phát Triển Việt Nam – Chi nhánh Đông Đô
xem thêm
- Hướng Dẫn Sử Dụng Máy Toàn Đạc Điện Tử Topcon ES Series
- Hướng Dẫn Sử Dụng Máy Toàn Đạc Điện Tử Leica FlexLine TS03