Chuyển giao công nghệ
Hướng Dẫn Thiết Lập Và Định Hướng Trạm Máy Với Máy Toàn Đạc Leica
Việc thiết lập và định hướng trạm máy là rất quan trọng với công tác đo vẽ thành lập bản đồ, do đó bạn phải hiểu và nắm rõ các công việc này trước khi thực hiện một công việc đo đạc.
Nếu bạn quên không thiết lập trạm máy và định hướng thì máy sẽ tự động sử dụng các số liệu toạ độ trạm máy và định hướng của lần đo gần đấy nhất để tính toán cho các điểm đo hiện tại.
Loạt bài viết chi tiết A-Z gồm hình ảnh và hình vẽ minh họa cách sử dụng máy toàn đạc điện tử Leica ( FlexLine Series):
- Các phím cứng, phím mềm, màn hình và cây thư mục – TẠI ĐÂY
- Cài đặt setting, cài đặt phím FNC, Trigger, User, Định tâm laser và cân bằng bọt thủy điện tử – TẠI ĐÂY
- Thiết lập và định hướng trạm máy – TẠI ĐÂY
- Cách đo vẽ bản đồ, chuyển điểm thiết kế ra thực địa, đường thẳng tham chiếu – TẠI ĐÂY
- Cách đo khoảng cách gián tiếp, đo độ cao không với tới, tính diện tích khối lượng – TẠI ĐÂY
- Ứng dụng đặc biệt: Cung tham chiếu và mặt phẳng tham chiếu – TẠI ĐÂY
- Ứng dụng đặc biệt: Ứng dụng giao thông Road 2D, ứng dụng COGO – TẠI ĐÂY
- Truyền trút dữ liệu – TẠI ĐÂY
Nguyên lý thiết lập và định hướng trạm máy
Việc thiết lập và định hướng trạm máy của tất cả các máy toàn đạc điện tử dựa vào nguyên lý sau:
Nguyên lý thiết lập trạm máy

- Hướng:
- X : Hướng Đông
- Y : Hướng Bắc
- Z : Hướng thẳng đứng vuông góc với mặt phẳng ngang
- Toạ độ trạm:
- X0 : Toạ độ X0 của trạm máy
- Y0 : Toạ độ Y0 của Trạm máy
- Z0 : Độ cao của trạm máy
Nguyên lý định hướng trạm máy
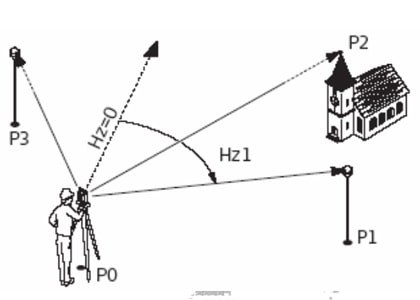
- P0 : Điểm trạm máy
- Các toạ độ đã biết:
- P1 : Toạ độ điểm đinh hướng thứ 1
- P2 : Toạ độ điểm đinh hướng thứ 2
- P2 : Toạ độ điểm đinh hướng thứ 3
- Tính toán ra:
- Hz1 : Góc định hướng
Việc nhập vào tọa độ điểm định hướng giúp cho máy có cơ sở định hướng bàn độ ngang khi xác định tọa độ của điểm đo.
Lưu ý: Để dễ dàng nắm bắt được bài viết này một cách dễ dàng, quý khách nên tham khảo trước bài viết sau:
- Hướng dẫn nhanh cách sử dụng máy toàn đạc Leica: Để hiểu về phím mềm, phím cứng, các ký hiệu, và sơ đồ thư mục hình cây
- Hướng Dẫn Cài Đặt Máy Toàn Đạc Điện Tử Leica: Để biết cách cài đặt các chức năng và các phím
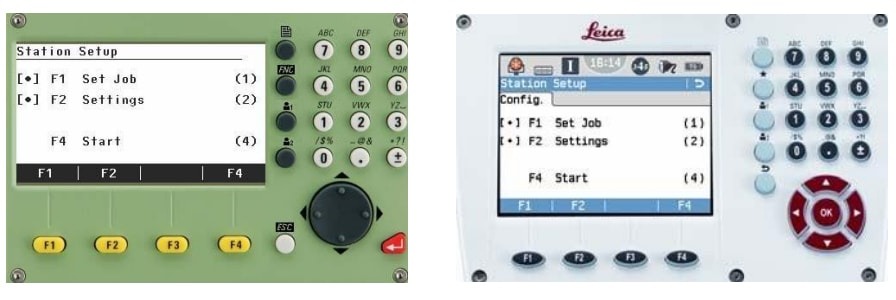
Thao tác thiết lập và định hướng trạm máy – Cụ thể ở bài viết này chúng tôi sử dụng dòng máy toàn đạc điện tử Leica (Flexline Series) – Từ màn hình Main menu → Chọn Program → chọn Stn.Setup, sau đó tiến hành thao tác với các bước như sau:
Bước 1: Đặt tên công việc ( Set JOB) trước khi thiết lập và định hướng trạm máy
Tạo job nhằm mục đích để lưu trữ dữ liệu và sau khi tạo job xong tất cả các dữ liệu sẽ được nhớ vào job đó như là một thư mục. Từ màn hình Stn. Setup, ấn phím F1, màn hình hiện ra:

Tới đây bạn có thể sử dụng job đã tạo trước hoặc tạo job mới.
- Nếu muốn sử dụng job đã tạo thì dùng phím di chuyển sang trái/phải để lựa chọn job (đã tạo) sau đó ấn phím [Cont] để chấp nhận và tiếp tục công việc.
- Nếu muốn tạo job mới, ấn phím [NEW], nhập tên job muốn đặt.
Sau khi nhập tên Job xong ấn [Cont] để hoàn thành và kết thúc việc tạo job, lúc này người sử dụng có thể nhìn thấy dấu chấm được tích trong [ ], như vậy là việc tạo job đã hoàn thành, với các bước khác khi thực hiện xong dấu cũng được tích tương tự. Ở mục này người sử dụng chỉ cần đặt tên job, các dòng khác có thể bỏ qua.
Chú ý:
- Nếu bạn không tạo job thì máy sẽ tự động mặc định một job có tên là “DEFAULT“.
- Tên job mới phải không được trùng với job đã có trong máy và tránh các ký tự đặc biệt như: “*”, “?”, “%”,”/”, “!”,”@”, “&”
Bước 2: Thiết lập giới hạn sai số trạm máy (Define Tolerances!/Set Accuracy limit)

- Accur. Posit : Độ chính xác vị trí mặt bằng.
- Accur. Height : Độ chính xác vị trí độ cao.
- Accur. Hz : Độ chính xác góc bằng
- Face I – II : Giới hạn độ sai lệch góc giữa hai vị trí bàn độ (sai số 2C)
- Calc.New Scale : Tính toán với Scale mới (No/Yes: Không/Có)
Lưu ý:
- Bạn có thể cài đặt giới hạn sai số cho phép vị trí điểm cho trạm máy, độ cao, góc bằng và giới hạn sai số góc ở 2 vị trí bàn độ, khi đo định hướng.
- Đối với giao hội nghịch với toạ độ cục bộ (Local Resection), dùng để định nghĩa hướng dương trục X, trục Y.
- Đối với giao hội Helmert, cài đặt trọng số khoảng cách, nghĩa là nó được sử dụng trong việc tính toán độ cao trạm máy trong giao hội nghịch.
- Đặt tính toán tỷ lệ (Calc.new Scale): Việc tính toán tỷ lệ cho các phương pháp thiết lập Giao hội nghịch (Resection) và giao hội nghịch Helmert (Resection Helmert). Tỷ lệ này có thể được thiết lập vào phép tính toán giao hội nghịch cuối cùng. Khoảng cách đo được luôn luôn giảm với tỷ lệ thiết lập trong máy. Để có được kết quả chính xác từ phép tính toán tỷ lệ trong giao hội nghịch, tỷ lệ PPM trong mục cài đặt bộ đo dài (EDM settings) phải được đặt là 0.
Sau khi cài đặt xong, ấn phím [Cont] để lưu và quay trở về màn hình Stn.Setup, tiếp tục công việc khác
Bước 3: Thiết lập điểm trạm máy (Set Station)
Sau khi tạo job và cài đặt động chính xác xong màn hình quay trở về màn hình như hình vẽ 2, Tiếp tục ấn phím F4 (Start), màn hình hiện ra:

Tới đây, ta có 2 cách thiết lập điểm trạm máy như sau:
Thiết lập điểm trạm máy – Cách 1: Gọi điểm từ trong bộ nhớ ra làm điểm trạm máy
Nhập vào tên điểm (đã lưu trong bộ nhớ) cần làm trạm máy tại dòng “Station” sau đó ấn phím ENTER, ví dụ điểm cần tìm làm trạm máy là điểm “TM” ( Như màn hình bên dưới):

Tiếp theo, ấn phím [Find], hoặc phím [Enter]/ OK, Sau đó lựa chọn đúng điểm cần làm trạm máy, ấn phím [Cont] để kết thúc việc thiết lập toạ độ trạm máy, lúc này màn hình sẽ trở về dạng như hình 5.
Tiếp theo tiến hành nhập chiều cao máy (hi), ví dụ trên màn hình là 1.4 m, và chọn phương pháp định hướng ở dòng “Method” (cụ thể phương pháp định hướng sẽ giới thiệu ở bước tiếp theo: Thiết lập định hướng, ấn [Cont] Để hoàn thành việc tạo lập thông tin cho trạm máy, đồng thời chuyển sang thiết lập định hướng.
Chú ý: Nếu không ấn phím [FIND] như trên thì bạn có thể ấn F4 ( ↓) để chuyển sang trang 2 và phím [LIST] để gọi ra danh sách điểm trong bộ nhớ rồi dùng phím di chuyển lên/xuống để lựa chọn điểm cần làm trạm máy, ấn [Cont].
Thiết lập điểm trạm máy – Cách 2: Nhập trực tiếp tọa độ
Từ màn hình như ở hình 4, ấn phím [ENH], màn hình hiện ra như sau:

Tới đây bạn nhập lần lượt:
- Nhập tên điểm làm trạm máy (dòng “PtID”), chú ý là tên điểm trạm máy không được trùng với tên điểm đã có trong job đó.
- Nhập vào toạ độ điểm trạm máy, với:
- East ứng với giá trị toạ độ Y
- North ứng với giá trị toạ độ X
- Height ứng với giá trị cao độ H
Nhập xong toạ độ, ấn [Cont] → màn hình sẽ trở về dạng như hình 5.
Tiếp theo tiến hành nhập chiều cao máy (hi), và chọn phương pháp định hướng ở dòng “Method”, ấn phím [Cont] để hoàn thành việc tạo lập thông tin cho trạm máy, đồng thời chuyển sang thiết lập định hướng ở bước 4
Bước 4: Thiết lập định hướng ( Set Orientation)
Bạn có thể sử dụng một trong các phương pháp định hướng sau:
Phương pháp 1: Định hướng bằng cách nhập toạ độ điểm định hướng – Or.With Coord
(Chú ý: Nếu chọn cách này thì tại bước “Thiết lập trạm máy” (hình 5) dòng Method phải chọn “Ori.with Coord” trước )
Sau khi thiết lập điểm trạm máy xong, màn hình hiện ra như hình sau:

Tới đây, người sử dụng có 2 cách thiết lập điểm định hướng bằng toạ độ:
Cách 1: Nhập trực tiếp toạ độ điểm định hướng
Ấn phím [ENH], sau đó nhập lần lượt:
- PtID: Tên (hay số thứ tự) điểm định hướng, chú ý là không được trùng với tên hay số thứ tự của điểm đã có trong job đang làm việc và phải khác tên (số thứ tự) điểm trạm máy.
- Toạ độ điểm định hướng, với:
- East ứng với giá trị toạ độ Y
- North ứng với giá trị toạ độ X
- Height ứng với giá trị cao độ H
Sau khi nhập xong ấn phím [Cont], màn hình lúc này hiện ra:

Tới đây bạn cần nhập vào chiều cao gương (hr) rồi tiến hành quay máy bắt mục tiêu chính xác vào điểm định hướng, ấn phím [Dist] + [Store] hoặc phím [Meas] để định hướng, màn hình hiện ra:

Tiếp theo, nếu chỉ định hướng đến 1 điểm và chỉ đo ở một vị trí bàn độ, ấn F4(Compute) để tính toán giá trị định hướng => ấn F4 (SET) để chấp nhận giá trị định hướng, màn hình hiện ra như hình sau:

Màn hình trên đưa ra cho bạn lựa chọn giá trị độ cao của điểm làm trạm máy, với ý nghĩa:
- H0 old : Tức là H0 là giá trị độ cao của điểm trạm máy nhập vào.
- H0 new: Là giá trị độ cao tính được dựa trên độ cao của điểm định hướng.
- ∆ H0 : Cho biết độ lệch (sai số) cao độ giữa giá trị ban đầu và giá trị mới tính được, tức mức độ tin cậy của mốc độ cao tại trạm máy, người dùng có thể dựa vào đó mà kiểm tra lại mốc hoặc ấn phím [Old] hoặc [New], như vậy tới đây là việc định hướng đã hoàn thành.
Chú ý rằng, khi định hướng tới màn hình trên người sử dụng có thể làm thêm:
- Measure more points : Định hướng tới vài điểm nữa (tối đa 10 điểm)
- Measure in other face: Định hướng thêm ở vị trí bàn độ khác.
- Access Tolerances: Truy cập điều chỉnh giới hạn sai số định hướng
Cách 2: Gọi điểm đã có trong bộ nhớ ra làm điểm định hướng
Từ hình 7, ta nhập như sau:
Nhập vào (dòng PtID:..) tên điểm (hay số thứ tự) của điểm cần làm địnhnhướng và ấn Enter/ OK – > [Cont].
Nhập vào chiều cao gương (hr) rồi tiến hành việc định hướng như trên. Nếu bạn nhập tên điểm định hướng mà không có job đó thì sẽ có thông điệp “Point not found in job” ấn phím [Cont], máy sẽ hiện ra chế độ tìm điểm (Point search) lúc này người sử dụng cần nhập trực tiếp toạ độ điểm định hướng vào bằng cách ấn [ENH]. Thao tác tiếp theo làm như cách 1.
Phương pháp 2: Định hướng bằng cách nhập góc – Ori.with Angle
(Chú ý: Khi chọn cách này thì tại Bước 3: Thiết lập trạm máy” (hình 5) dòng Method phải chọn “Ori.with Angle” trước).
Sau khi thiết lập điểm trạm máy xong, màn hình hiện ra như hình sau:

Tiếp theo, tiến hành:
- Ngắm chính xác vào tiêu hoặc gương ở điểm định hướng
- Nhập góc định hướng (Hz)
- Chiều cao gương (hr)
- Tên điểm (số thứ tự) định hướng (Point).
Sau đó bắt chính xác tiêu, ấn phím F2 (SET) để định hướng.
Sau khi định hướng màn hình quay trở về màn hình Main Menu, như vậy việc thiết lập định hướng đã hoàn thành.
Tới đây bạn có thể lựa chọn các ứng dụng sau đó ấn phím [Start] để bắt đầu công việc luôn mà không phải thiết lập lại các bước trên, tuy nhiên nếu không làm theo thứ tự trên bạn cũng có thể vào từng ứng dụng cụ thể và làm lần lượt các bước như trên sau đó tiến hành đo bình thường.
Phương pháp 3: Định hướng bằng cách đo giao hội nghịch – Resection
Chương trình giao hội nghịch dùng để xác định toạ độ điểm đặt máy dựa vào tọa độ của các điểm khống chế.
Để thực hiện chương trình này, máy phải được đặt ở vị trí có thể nhìn thấy ít nhất 2 điểm khống chế (tuy nhiên nên đo tối thiểu tới 3 điểm để kết quả đo đạt độ chính xác cao hơn).
Từ màn hình Main menu → Programs → ấn Enter/OK→Lựa chọn [Stn.Setup]
Tiếp theo bạn làm như sau:
- Bước 1: Ấn F1 (Set job): Đặt tên công việc.
- Bước 2: Ấn F2 (Settings): Cài đặt giới hạn độ chính xác cho điểm cần giao hội nếu cần (nếu yêu cầu độ chính xác không cao có thể bỏ qua bước này). Tại đây bạn có thể nhập giá trị giới hạn của độ lệch tiêu chuẩn. Nếu giá trị tính toán vượt quá giá trị cho phép thì sẽ xuất hiện thông điệp cảnh báo, lúc đó máy sẽ cho phép bạn quyết định tiếp tục đo hay dừng lại. (Xem chỉ dẫn chi tiết cài đặt tại Bước 2: Thiết lập giới hạn sai số trạm máy
- Bước 3: Start/ bắt đầu đo
Màn hình hiện ra:

- Tại dòng Method, chọn “Resetion”.
- Nhập tên trạm máy (Station)
- Chiều cao máy (hi)
- Ấn [Cont] => màn hình hiện ra:

Tới đây:
- Nếu điểm đo tới đã lưu trong bộ nhớ của máy, thì bạn chỉ cần nhập vào tên điểm đo tới ở dòng (PtID) -> [Enter]/OK, nhập chiều cao gương (hr) sau đó ấn phím [Meas] để đo lưu.
- Để nhập trực tiếp toạ độ điểm đo tới vào, ấn phím [ENH], màn hình hiện ra:

Nhập tên điểm đo tới, nhập vào giá trị toạ độ của điểm đó → [Cont], màn hình hiện ra như sau:

Nhập chiều cao gương và ngắm chính xác vào gương ấn phím [Meas] để đo, màn hình hiện ra:

Ấn phím F1 (Measure more points) để chuyển sang đo tới điểm khác. Sau khi đã đo đủ số lượng điểm đo cần thiết (đo tới tối thiểu 2 điểm và tối đa 10 điểm):
→ Để tính ra kết quả toạ độ điểm giao hội, ấn phím F4 (COMPUTE) để tính toán giá trị định hướng => Set (hoàn thành việc giao hội – định hướng và chấp nhận giá trị toạ độ trạm máy vừa tính được).
Phương pháp 4: Định hướng bằng cách đo giao hội nghịch Helmert
Phương pháp giao hội nghịch Helmert ( Helmert Resection) cách làm tương tự như phương pháp giao hội nghịch thông thường (Resection), chỉ có sự khác nhau ở chỗ là phương pháp giao hội nghịch Helmert thì sau khi đo giao hội, các góc và khoảng cách được hiệu chỉnh trên cơ sở hệ thống toạ độ cục bộ (local) và toàn cầu (global system), đồng thời một phép chuyển đổi toạ độ 2D được đưa vào sử dụng, với 4 tham số (dịch chuyển x, dịch chuyển y, góc quay và tỷ lệ) hoặc 3 tham thố (dịch chuyển x, dịch chuyển y, góc quay), phụ thuộc vào tỷ lệ cài đặt trong cấu hình.
Phương pháp 5: Định hướng bằng cách đo giao hội nghịch với hệ toạ độ địa phương – Local resection
Cách đo tương tự như giao hội nghịch thông thường, tuy nhiên phép đo chỉ thực hiện tới 2 điểm là:
- Điểm gốc của hệ thống toạ độ địa phương (E = 0, N = 0, H = 0)
- Điểm nằm trên hướng Bắc hoặc hướng Đông của hệ toạ độ
Các tỷ lệ và sai số tiêu chuẩn là không được tính toán.
Phương pháp 6: Định hướng kết hợp truyền độ cao về trạm máy
Sau khi thực hiện đến màn hình 5, tại dòng Method, chọn “H-Trans”. Cách làm này tương tự định hướng theo phương pháp toạ độ, tuy nhiên nó được sử dụng khi người dùng muốn sử dụng độ cao của điểm định hướng để truyền về trạm máy làm độ cao gốc tính truyền cho các điểm đo chi tiết sau này, hoặc muốn kiểm tra độ cao của trạm máy.
Các thông điệp/ cảnh báo có thể xuất hiện trong quá trình định hướng.
- Selected point has invalid data! Check data and try again!: Đây là thông báo xuất hiện nếu điểm đo tới không có toạ độ X hoặc Y
- Max. 10 points supported!: 10 điểm đã được đo nhưng vẫn đo thêm điểm nữa. Hệ thống chỉ hỗ trợ tối đa 10 điểm.
- No position computed due to bad data!: Các điểm đo có thể không cho phép toạ độ trạm cuối cùng (X, Y) đưa vào tính toán
- No height computed due to bad data!: Chiều cao gương bị sai hoặc các phép đo không đủ để tính toán độ cao trạm
- Face I/II mismatch!: Lỗi này xuất hiện nếu một điểm đã đo trong một mặt và phép đo ở mặt thứ hai có sai số góc bằng hoặc góc đứng vượt giới hạn cho phép
- No data measured! Measure point again!: Dữ liệu đã đo không đủ để có thể tính toán vị trí hoặc độ cao. Hoặc là không đo đủ điểm hoặc không đo khoảng cách.
Một số lưu ý trong quá trình thiết lập và định hướng trạm máy
- Nếu một điểm đo được đo vài lần trong cùng một mặt, thì chỉ có giá trị của phép đo cuối cùng được sử dụng để tính toán dữ liệu liên quan.
- Đối với phương pháp giao hội nghịch:
- Gương được sử dụng khi đo ở mặt I và mặt II phải giống nhau.
- Nếu các mã điểm khác nhau ở mặt I và mặt II được dùng, thì mã điểm ở mặt I được gán cho mã điểm đó. Nếu chỉ có phép đo ở mặt II có mã điểm thì mã điểm ở mặt II này được gán cho điểm đo đó.
- Mã nguồn mở XML không cho phép thay đổi giá trị ppm trong quá Stn.Setup
- Nếu tỷ lệ được tính toán, thì độ lệch tiêu chuẩn (standard deviation) của vị trí với hai điểm đo là 0.0000. Với tỷ lệ linh hoạt, phép đo giao hội nghịch là hoàn hảo trong đồ hình mà không có trị đo thừa. Do đó độ lệch tiêu chuẩn là 0.0000
- Nếu chiều cao của máy được đặt là 0.000 trong màn hình cài đặt, thì độ cao trạm máy được tính tới độ cao của trục nghiêng (trục quay của ống kính).
Cách đo các chương trình ứng dụng bằng máy toàn đạc Leica trong loạt bài viết về cách sử dụng máy toàn đạc. Bài viết được xuất bản bởi kỹ sư của Công ty CP Phát Triển Công Nghệ Trắc Địa Việt Nam, mọi khó khăn trong quá trình đo đạc thực địa, bạn vui lòng liên hệ để được tư vấn và hỗ trợ tốt nhất:
- CÔNG TY CP PHÁT TRIỂN CÔNG NGHỆ TRẮC ĐỊA VIỆT NAM
- VPGD: Số 21, ngõ 10 – đường Trần Duy Hưng – Q.Cầu Giấy – TP.Hà Nội
- Điện thoại: 0243 7756647 – 0913.37.86.48
- Đại diện: Ông Nguyễn Văn Dũng
- MST: 0102305681 – STK: 12510000160392
- Tại Ngân Hàng TMCP Đầu Tư Và Phát Triển Việt Nam – Chi nhánh Đông Đô
xem thêm