Tin tức
Hướng dẫn cách sử dụng máy RTK (P.1)
Hướng dẫn cách sử dụng máy RTK
CÁCH SỬ DỤNG MÁY RTK GNSS KOLIDA K96T – SOUTH S82
Dịch vụ đo đạc khảo sát địa hình ứng dụng công nghệ định vị GNSS hay GPS cho số liệu đo đạc khảo sát một cách nhanh chóng.
P.1. PHƯƠNG PHÁP ĐO VỚI TRẠM BASE BIẾT TỌA ĐỘ
1.Bước 1. Khởi động phần mềm của South
– Khởi động Field book, click vào biểu tượng cửa sổ để mở Menu
– Click đúp biểu tượng để Khởi động phần mềm EGStar 3.0

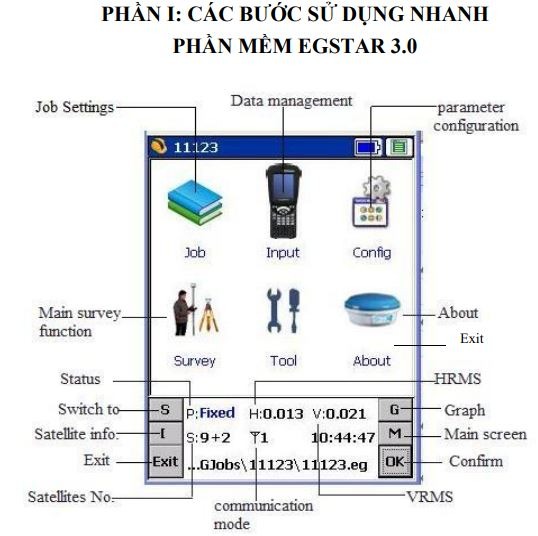
2.Bước 2. Tạo Job sẵn và cài đặt các thông số cho Job làm việc

– Menu Job có các chức năng:
+ New Job: Tạo một Job mới
+ Open Job: mở một Job có sẵn trong máy RTK
+ File Import/Export: xuất, nhập dữ File Job
+ Exit: Thoát Menu Job
– Để tạo Job mới, Click vào biểu tượng Job > New Job để tạo Job mới
– Tạo Job:
+ Storage media: chọn vị trí lưu Job
+ Project name: tên bất kỳ
+ Copy Mode: Lấy phần cài đặt của Job đã có sẵn, Nếu tạo mới hoàn toàn Job thì không chọn mục này
+ Click “OK” để hoàn tất việc tạo Job mới
3. Bước 3. Cài đặt Job
– Từ Menu chính Click Config > Job Config

Hướng dẫn cách sử dụng máy RTK
– Cài đặt các thông số như hình 2-6:
+ Mục Antenna: nhập chiều cao antenna, chú ý đây là chiều cao của Rover
Nhập chiều cao tại ô Ant.H
Chọn phương pháp đo cao, có 4 phương pháp: Real, Slant, Pole, Slice
+ Mục Limit: Cài đặt các thông số
Mask angle: góc ngưỡng thu vệ tinh
Time zone: nhập múi giờ địa phương
Coordinate Order: Định dạng ghi tọa độ
HRMS limit: giới hạn sai số mặt bằng tối đa
VRMS limit: giới hạn sai số độ cao tối đa
PDOP limit: giới hạn PDOP, click chọn “Use” để sử dụng
Dist.To Base: (m) khống chế khoảng cách tối đa từ trạm Base đến trạm Rover
4.Bước 4. Tạo mới và cài đặt Hệ tọa độ
– Từ Menu chính Click Config > Coordinate System. Xuất hiện cửa sổ Coordinate system list với các Hệ tọa độ đã tạo sẵn. Để tạo mới hệ tọa độ ta Click chọn “Add”, để sửa hệ tọa độ đã tạo ta Click chọn Edit.
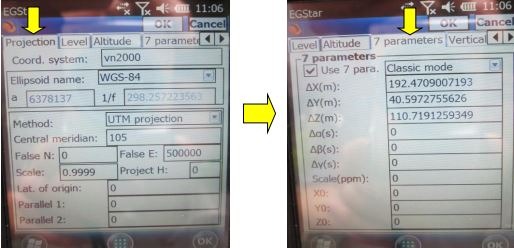
– Nhập các thông số cho hệ tọa độ: Chỉ cần nhập các thông số ở mục Projection và mục 7 parameters, các mục khác để mặc định
Hướng dẫn sử dụng máy RTK
+ Mục Projection:
Coord. System: đặt tên hệ tọa độ
Ellipsoid name: chọn Ellipsoid
Method: Chọn phép chiếu
Central meridian: Nhập kinh tuyến trục, định dạng “Độ.phút.giây”, ví dụ: 105.30.00
False N: Dịch trục N = 0
False E: Dịch trục E = 500000
Scale: Nhập tỷ lệ biến dạng tương ứng với từng múi chiếu
Project H: 0, Lat. Of origin: 0, Parallel 1: 0, Parallel 2: 0
+ Mục 7 parameters:
Click chọn “Use 7 parameters” tiến hành nhập các thông số tính chuyển.
– 7 tham số tính chuyển từ WGS–84 sang VN–2000 theo QĐ 05/2007/QĐ-BTNMT:
- ∆X (m): 191,90441429 ∆α(s): 0,00928836 X0: 0
- ∆Y(m): 39,30318279 ∆β(s): -0,01975479 Y0: 0
- ∆Z(m): 111,45032835 ∆γ(s): 0,00427372 Z0: 0
Scale(ppm): 1,000000252906278
– Bấm “Ok” trên góc bên trên phía phải màn hình để hoàn tất quá trình tạo hệ tọa độ mới
đồng thời để trở về Menu chính.
5.Bước 5. Kết nối Bluetooth với trạm Base
Từ Menu chính Click Config > Bluetooth Manager. Các bước kết nối Bluetooth với máy thu:
+ Click “Close” để ngắt kết nối với các thiết bị khác (nếu đã kết nối)
+ Click “Search” để tìm kiếm Bluetooth của máy thu, xuất hiện thông báo
“Bluetooth search access” thiết bị đã tiến hành quét xong, bấm ok để chấp nhận, lúc này sẽ xuất hiện danh sách tên các máy thu mà thiết bị dò tìm được.
+ Chọn máy thu cần kết nối (máy thu đặt làm trạm Base), Click “Connect” để kết Bluetooth với máy thu RTK đó.
+ Xuất hiện thông báo “Bluetooth connect success”, bấm ok để chấp nhận, sau đó bấm “Exit” để thoát.
6.Bước 6. Thiết lập trạm Base
– Từ Menu chính, Click Config > Divice Config > Instrucment Config. Xuất hiện hộp thoại Instrumental.
6.1. Chọn chế độ làm việc: Cài đặt máy thu thành trạm Base
– Từ hộp thoại Instrument, Click chọn Work mode setting > Set work mode, bấm Next > Chọn Base > Ok.
6.2. Chọn phương pháp truyền dữ liệu: Data link
– Từ hộp thoại Instrument, Click chọn Work mode setting > Set data link, bấm Next > Chọn External radio > Ok. (Đối với trạm Base ta chọn Radio ngoài).
Chú ý: Việc cài đặt chế độ làm việc, phương pháp truyền số liệu cho từng máy thu chỉ cần làm một lần, máy thu sẽ mặc định chế độ làm việc này cho các lần tiếp theo.
Điều này có nghĩa khi ta chọn máy nào đó làm trạm Base hay Rover thì từ lần sau chỉ cần kết nối Bluetooth, máy thu RTK đó sẽ mặc định chế độ làm việc như thế (có thể bỏ qua bước 6.1 và 6.2).
6.3. Cài đặt trạm Base
– Từ hộp thoại Instrucment, Click chọn Base setting, xuất hiện hộp thoại:
– Nhập các thông số cho trạm Base
+ Mục Base parameters
- Msg.type: RTCM3 Interval time:
- Diff.mode: RTK Mask angle: Góc ngưỡng 15o
- Ant.H: Cao Ăng ten của trạm Base PDOP Limit: giới hạn PDOP
+ Mục Base coordinate: Nhập tọa độ trạm Base. Click chọn Plane để nhập tọa độ N,E,H.
– Bấm “Start”, xuất hiện thông báo “Base start successful” là hoàn thành cài đặt trạm Base. Bấm để trở về Menu chính.
7.Bước 7. Kết nối Bluetooth với trạm Rover
– Việc kết nối Bluetooth với trạm Rover được làm tương tự như việc kết nối Bluetooth với trạm Base (Làm tương tự như bước 5). Chú ý, lúc này ta phải kết nối Bluetooth với máy thu làm Rover thay vì kết nối với máy làm trạm Base.
8.Bước 8. Thiết lập trạm Rover
– Từ Menu chính, Click Config > Divice Config > Instrucment Config. Xuất hiện
hộp thoại Instrucment.
8.1. Chọn chế độ làm việc: Cài đặt máy thu thành trạm Rover
– Từ hộp thoại Instrucment, Click chọn Work mode setting > Set work
mode, bấm Next > Chọn Rover > Ok
8.2. Chọn phương pháp truyền dữ liệu: Data link
– Từ hộp thoại Instrucment, Click chọn Work mode setting > Set data link, bấm Next > Chọn Internal radio > Ok. (Đối với trạm Rover ta chọn Radio trong).
– Bấm để trở về Menu chính. Như vậy là ta đã hoàn thành việc thiết lập trạm Rover.
Chú ý: Cũng tương tự như việc thiết lập trạm Base, việc cài đặt chế độ làm việc và phương pháp truyền số liệu cho trạm Rover chỉ cần làm một lần, máy thu sẽ mặc định chế độ làm việc này cho các lần tiếp theo. Từ lần sau chỉ cần kết nối Bluetooth, máy thu RTK đó sẽ mặc định chế độ làm việc là trạm Rover (có thể bỏ qua bước 8).
9.Bước 9. Kết nối Radio trạm Rover với trạm Base
– Từ Menu chính, Click Config > Divice Config > Radio Config. Xuất hiện hộp thoại Radio Channel.
– Tại mục Switch channel ta chọn kênh Radio tương ứng với kênh trên bộ phát ở trạm Base.
– Bấm “Switch” để chuyển sang kênh vừa chọn.
– Bấm “Exit” để thoát về Menu chính. Lúc này trên màn hình sổ tay sẽ xuất hiện số kênh vừa
chọn và cột sóng nhận được.
10.Bước 10. Vào chương trình đo chi tiết
– Từ Menu chính, Click Survey > Point Survey. Xuất hiện hộp thoại Point Survey.
– Click chọn biểu tượng mũi tên góc dưới bên phải màn hình để lấy các phím chức năng
– Lưu điểm đo: Click “SA” nếu các sai số đạt dưới giới hạn đã thiết lập, phần mềm sẽ hiện ra cửa sổ. Nhập tên điểm, mã Code, chiều cao Ant, phương pháp đo cao, bấm OK để lưu điểm đo.
– Xem danh sách điểm đo: Click “VI” để vào danh sách điểm đã đo, ở đây ta có thể sửa chữa thông tin nhập vào của điểm đo hoặc xóa các điểm đã đo.
Nếu gặp bất kỳ sự cố nào trong quá trình dùng máy RTK, hãy liên lạc với đội ngũ kỹ thuật để có hỗ trợ và chuyển giao công nghệ miễn phí – 24h. Qúy khách có nhu cầu, hãy gọi 0913.37.86.48 để có giá tốt nhất


Vì sao máy GPS RTK của hãng eSurvey lại rất tốt
Dòng máy GPS RTK (Real-Time Kinematic) của hãng eSurvey là một trong những thiết bị ...

Hướng dẫn sử dụng máy đo RTK: Công nghệ tiên tiến trong đo đạc địa chất
Máy đo RTK (Real-Time Kinematic) là một công nghệ đo đạc địa chất tiên tiến ...

Báo giá máy GPS RTK 2 tần số tốt nhất với giá thành rẻ hợp lý
Báo giá máy GPS RTK 2 Tần ESurvey, Trimble, Hi-Target, CHCNAV, South, Comnav, Geomate, Satlab, ...