Tin tức
Hướng dẫn cách nhập tọa độ vào máy toàn đạc Nikon
Cách nhập tọa độ vào máy toàn đạc Nikon dễ sử dụng nhất, đo linh động, nhiều ứng dụng. Cùng tìm hiểu tính năng cơ bản của dòng máy này!

Cách nhập tọa độ cho vào máy toàn đạc Nikon
Giả sử tọa độ trạm máy và mục tiêu đã có, ngắm tại mục tiêu để thiết lập định hướng và độ cao

Bước 1: >> Nhập tên trạm và chiều cao máy >> OK >> F4 Cont.
Bước 2: >> F4 ENH nhập tọa độ trạm máy.
Hoặc:
+ Bấm F1 List: chọn tọa độ từ danh sách bộ nhớ
+ Bấm F2 Find: tìm tọa độ điểm trong Job hiện tại
+ Bấm F3 ENH=0: gán tọa độ E=0, N=0, H=0
>> Ta nhập tọa độ trạm máy > OK > F4 Cont để tiếp tục.
Bước 3: Nhập tên điểm mục tiêu > OK
Bước 4: > F4 ENH để nhập tọa độ điểm mục tiêu. Bước này giống như nhập tọa độ trạm máy.
Sau khi nhập xong >> F4 Cont để tiếp tục.
Bước 5: Tiến hành máy toàn đạc ngắm chính xác đến điểm mục tiêu > F1 Meas để đo và lưu điểm.
Hoặc bấm:
+ > F2 Dist: đo khoảng cách nhưng không lưu lại
+ > F3 Store: save kết quả
+ > F4 : chuyển sang chức năng: F1 Code (Gán mã cho điểm), F2 View (Xem thông tin điểm), F3 EDM (Cài đặt EDM).
Bước 6: > F4 Compute để tính toán định hướng. Hoặc:
+ > F1 : đo thêm điểm mục tiêu
+ > F2 : đo trên bàn độ trái
+ > F3 : truy cập cài đặt dung sai
Cuối cùng, kiểm tra kết quả tính toán. Bấm F4 Set để thiết lập trạm máy và bắt đầu đo đạc
Những tính năng của máy toàn đạc Nikon
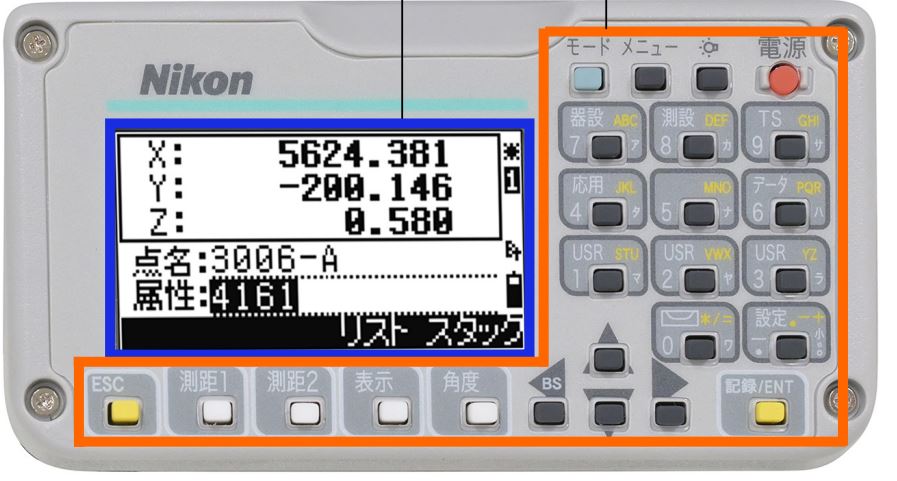
Phím chức năng máy toàn đạc Nikon:
* [ Mode ] : chữ sang số
* [ ESC ] : thoát
* [ REC ] / [ ENT ] : chọn để lưu, hoặc đồng ý
* [ MSR1 ] / [ MSR2 ] : đo số 1, đo số 2 .
* [ DSP ] : lật trang màn hình hiển thị .
* [ ANG ] : công dụng góc
* ► Phím di chuyển, xóa 1 ký tự– Phím chương trình:
* [USR] 1/ [USR] 2: do người dùng đặt.* [ COD ] 3 : code
* [ PRG ] 4 : Programs ( chương trình ứng dụng )
* [ DAT ] 6 : Data ( dũ liệu )
* [ STN ] 7 : Station : setup trạm máy .
* [ S-O ] 8 : Bố trí điểm ra thực địa .
* [ O / S ] 9 : Offset : Các chương trình Offset

Các kí hiệu ở máy toàn đạc điện tử Nikon
1. Các kí hiệu hiển thị
– HA: góc ngang phải – L: dịch gương sang trái
– HL: góc ngang trái – IN: dịch gương thẳng về phía hướng máy
– VA: góc đứng – OUT: dịch gương ra xa phía hướng máy
– SD: khoảng cách nghiêng – FILE: nâng cao chiều cao gương
– VD: chênh cao – CUT: hạ thấp chiều cao gương
– HD: khoảng cách bằng – Vh: độ cao không với tới
– V%: phần trăm độ góc đứng – rSD: khoảng cách nghiêng giữa 2 điểm
– X, Y, Z: tọa độ – rHD: khoảng cách bằng giữa 2 điểm
– PT: tên điểm đo – rHA: phương vị từ điểm 1 sang điểm 2
– BS: điểm định hướng – rV%: phần trăm độ dốc (rVD/rHD) x100%
– HT: chiều cao gương – rGD: dốc đứng (rHD/rVD)
– STN: điểm trạm máy – dHD: hiệu khoảng cách bằng
– HI: chiều cao máy toàn đạc – R: dịch gương sang phải
– dZ: hiệu khoảng cách bằng – dha: hiệu khoảng cách bằng
– Dvd: hiệu khoảng cách đứng
Cách dùng máy toàn đạc điện tử Nikon
Ta đặt chân máy toàn đạc lên một vị trí chắc chắn cố định và đặt máy toàn đạc điện tử lên và siết ốc nối chân máy với đế máy toàn đạc
Cân bằng máy toàn đạc điện tử
Bật nguồn máy toàn đạc >>[ PWR ] sau đó quay nhẹ ống kính 1 góc khoảng chừng 45 º để khởi động bàn độ. Khởi động bàn độ xong thì mới triển khai thao tác với máy được
Sử dụng máy toàn đạc ngoài hiện trường
1. Khi thao tác ngoài hiện trường ta cân 2 bọt thủy (dài, tròn) vào chính giữa. Nếu đặt máy tại mốc thì phải chỉnh dọi tâm máy vào chính giữa tâm mốc, còn với tính năng giao hội thì không cần làm
2. Mở đảo ống kính khoảng chừng 45 ° > ( Menu ) chọn 1 ( job ) tạo việc làm ấn > creat ghi tên không quá 8 ký tự > ấn ( ENT )
3. Thao tác đặt trạm máy tại mốc :
Ấn > 7 ( STN ) xong ta chọn 1 ( Known ) > ấn ( ENT ) nhập tên điểm và tọa độ đã biết vào > ấn ( ENT ), đo chiều cao máy toàn đạc từ đỉnh mốc tới điểm ghi lại của máy nhập vào ( HI ). Chọn điểm theo hai cách tọa độ ( 1C oord ) và góc ( 2 Angle ), chọn ( 1C oord ) xong >( ENT ) ngắm ống kính đến điểm mốc đang dựng gương và ấn phím đo ( MSR1 / MSR2 ) xong màn hình hiển thị suất hiện dòng nhắc – REC STN – > ấn ( ENT ) đã triển khai xong thao tác đặt trạm máy. Kiểm tra lại > ấn phím đo tới mốc và so sánh
4. Đặt trạm máy theo giải pháp giao hội :
Ấn phím 7 ( STN ) chọn 2 Resection. Nhập tọa độ điểm đo gương thứ 1 ( PT ), nhập chiều cao của gương ( HT ) > đo MSR1 / MSR2 tới gương > ấn ( ENT ) quay ống kính máy tới điểm gương thứ 2 ( PT ) nhập tọa độ vào xong, nhập chiều cao gương ( HT ) ấn phím đo tới gương xong ấn ( ENT ). Kết thúc trạm máy đã được thiết lập xong
5. Chuyển điểm ra ngoài thực địa
6. Khi đã thao tác đặt trạm máy xong > chọn phím 8 ( S-O ) có 2 cách tìm điểm hoặc cắm điểm ra thực địa
7. Tìm theo góc vị trí và khoảng cách, chọn 1 ( HA-HD ) màn hình hiển thị suất hiện nhập khoảng cách ( HD ) và nhập góc vị trí ( HA ) nhập xong, đưa ống kính tới vị trí của gương và > ấn đo MSR1 / MSR2 điều chỉnh gương về đúng vị trí khoảng cách ( HD ) và góc vị trí ( HA ) là 00 ° 00 ’ 00 ” là điểm cần tìm hoặc cắm điểm
8. Tọa độ hoặc cắm điểm :
Chọn 2 ( XYZ ) > ấn ENT, nhập tên điểm ( PT ) cần tìm hoặc đã có trong list thì gọi ra, màn hình hiển thị báo dHA chỉ góc ngang cửa điểm cần tìm, dHD chỉ khoảng cách tới điểm cần tìm. Ta xoay ống kính ngắm tới gương > ấn phím MSR1 / MSR2 đo cho tới những hiệu quả tính về 0 là điểm cần tìm .
Đo cắm mốc
Khi đặt trạm máy xong > ấn 4 ( PRG ), chọn 1 ( 2P t Refline ) là chia nhỏ điểm trên đoạn thẳng và bẻ vuông góc tim tuyến sang 2 bên. Nhập tuần tự tên điểm PT1, PT2, nếu chưa có tọa độ thì ta nhập vào, nếu có trong ( Job ) rồi thì gọi ra ( List ). Màn hình sẽ hiển thị sau khi đo tới gương, Trong đó : ( Sta … ) thông tin khoảng cách ở giữa tính từ PT1đến PT2, ( O / S … ) là khoảng cách vuông góc cách trục PT1 đến PT2