Tin tức
Định vị và lập bản đồ SLAM trong lái xe tự động
Trong công nghệ xe lái tự hành đang phát triển mạnh mẽ, SLAM như một trong những nền tảng cốt lõi giúp phương tiện có thể “hiểu” và di chuyển an toàn trong môi trường thực tế. Công nghệ này cho phép xe vừa xác định vị trí của mình, vừa xây dựng bản đồ môi trường xung quanh theo thời gian thực – một yêu cầu quan trọng khi không thể phụ thuộc hoàn toàn vào GPS.
SLAM là gì?
SLAM (Simultaneous Localization and Mapping) là một phương pháp xử lý dữ liệu giúp hệ thống:
- Xác định vị trí chính xác của xe tự hành
- Đồng thời tạo ra bản đồ 3D hoặc 2D của môi trường
Điểm đặc biệt là hai quá trình này diễn ra cùng lúc và liên tục, hỗ trợ lẫn nhau để cải thiện độ chính xác.
SLAM thường hoạt động theo các bước:
- Thu thập dữ liệu từ cảm biến
- Trích xuất đặc trưng
- So khớp và theo dõi chuyển động
- Xây dựng bản đồ
- Hiệu chỉnh sai số
Vai trò của SLAM trong lái xe tự động
Trong điều kiện thực tế, xe lái tự hành phải đối mặt với nhiều thách thức như:
- Môi trường thay đổi liên tục
- Vật cản bất ngờ xảy ra (người, xe khác, chướng ngại vật)
- Tín hiệu GPS bị yếu hoặc mất hoàn toàn (trong hầm, khu đô thị dày đặc)

- Định vị chính xác ngay cả khi không có GPS
- Xây dựng bản đồ chi tiết theo thời gian thực
- Lập kế hoạch di chuyển an toàn và tối ưu
Các công nghệ SLAM phổ biến
Hiện nay, SLAM được triển khai dựa trên nhiều loại cảm biến khác nhau:
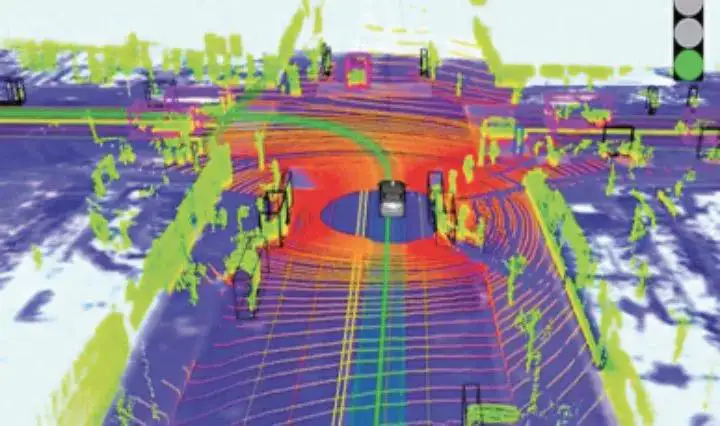
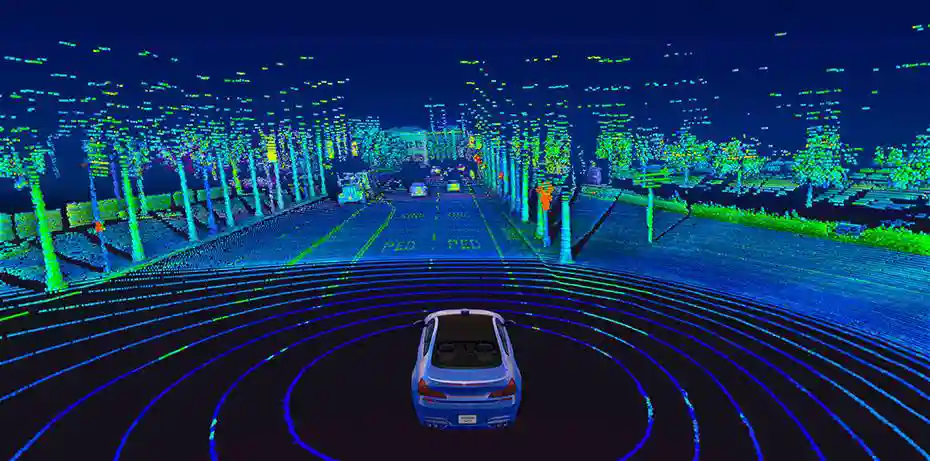
- LiDAR SLAM: sử dụng tia laser để quét môi trường, máy quét laser cho độ chính xác cao
- Visual SLAM (V-SLAM): dùng camera để nhận diện và tái tạo không gian
- Sensor Fusion SLAM: kết hợp nhiều cảm biến (LiDAR + camera + IMU) để tăng độ ổn định
Mỗi phương pháp có ưu và nhược điểm riêng, nhưng xu hướng hiện nay là kết hợp đa cảm biến để đạt hiệu quả tốt nhất.
Dù rất quan trọng, SLAM vẫn gặp một số hạn chế:
- Độ phức tạp tính toán cao → cần phần cứng mạnh
- Ảnh hưởng bởi môi trường (mưa, sương mù, ánh sáng yếu)
- Sai số tích lũy theo thời gian nếu không được hiệu chỉnh tốt
Do đó, các hệ thống hiện đại thường tích hợp thêm AI và học máy để cải thiện khả năng nhận diện và giảm sai số.
Phát triển trong tương lai, SLAM sẽ tiếp tục được nâng cấp theo các hướng:
- Kết hợp sâu với trí tuệ nhân tạo (AI)
- Đồng bộ dữ liệu với bản đồ đám mây
- Tối ưu hóa để chạy trên phần cứng nhỏ gọn, tiết kiệm năng lượng
Những cải tiến này sẽ giúp xe lái tự hành hoạt động ổn định hơn trong môi trường phức tạp, từ đô thị đông đúc đến khu vực chưa có bản đồ.
Ứng dụng của SLAM không chỉ trong xe tự lái mà còn ở:
- Robot giao hàng, robot hút bụi
- Flycam Drone bay tự động
- Máy quét laser 3D SLAM trong xây dựng, trắc địa
- AR/VR (thực tế ảo tăng cường)
SLAM như “đôi mắt và bộ não định hướng” của xe tự lái. Nhờ khả năng vừa định vị vừa lập bản đồ, công nghệ này giúp phương tiện hiểu rõ môi trường xung quanh và đưa ra quyết định di chuyển chính xác. Trong hành trình hướng tới giao thông thông minh, SLAM góp phần nâng cao độ an toàn và hiệu quả cho hệ thống lái xe tự động.
Trong hệ sinh thái xe lái tự hành, SLAM khi kết hợp với AI và dữ liệu lớn, mở rộng khả năng ứng dụng, từ giao thông thông minh đến các lĩnh vực như robot, xây dựng và thực tế ảo.